深度学习的实践方面
训练集/验证集/测试集(Train/Dev/Test set)
| Train | Dev | Test | |
|---|---|---|---|
| 小数量 | 70% | 30% | |
| or | 60% | 20% | 20% |
| 百万级数据样本 | 98% | 1% | 1% |
| 超过百万 | 99.5% | 0.25% | 0.25% |
| or | 99.5% | 0.4% | 0.1% |
偏见与方差(bias&varience)
| 训练集错误率 | 1% | 15% | 15% | 0.5% |
| 开发集错误率 | 11% | 16% | 30% | 1% |
| high varience | high bias | high bias & varience | low bias & varience | |
| 过拟合overfitting | 欠拟合unfitting | 一些地方欠拟合,一些地方过拟合 |
以上分析基于:human=0% (optimal/base error 理想误差/基误差)
解决办法
graph TD; |
正则化
对较大值的系数进行惩罚
L2 regularization
逻辑回归中:$J\left( {w,b} \right) = \frac{1}{m}\sum\limits_{i = 1}^m {L({\hat{y}^{(i)}},\mathop y\nolimits^{(i)} )} + \frac{\lambda}{2m}|w|^2$ $|w|^2=\sum\limits_{j=1}^{n_x}w_j^2=w^Tw$
神经网络中:$J\left( {w^{[1]},b^{[1]}, …, w^{[l]},b^{[l]}} \right) = \frac{1}{m}\sum\limits_{i = 1}^m {L({\hat{y}^{(i)}},\mathop y\nolimits^{(i)} )} + \frac{\lambda}{2m}|w^{[l]}|^2$ $|w^{[l]}|^2=\sum\limits_{i=1}^{n^{[l-1]}}\sum\limits_{j=1}^{n^{[l]}}{w_{ij}^{[l]}}^2$
用backprop计算dw的值:${\text{w}}^{[l]}: = {\text{w}}^{[l]} - \partial (dw + \frac{\lambda }{m}{w^{[l]}}) = (1 - \frac{\partial \lambda }{m}){w^{[l]}} - \partial dw$
正则化减少过拟合的原因:$\lambda$增大,新的${\text{w}}^{[l]}$减小,隐藏单元的影响减小,存在一个$\lambda$的中间值使得接近”just right”的中间状态
随机失活正则化(Dropout regularization): 设置消除神经网络中节点的概率
在神经网络的训练过程中,随机地丢弃(屏蔽)一部分神经元的输出,即将它们的权重置为零。通过这种方式,可以防止神经网络过度依赖某些特征,从而提高模型的泛化能力和鲁棒性。Dropout技术通常应用于神经网络的隐藏层上,并按照一定的概率p随机失活部分节点,在后向传播时进行相应的参数更新
最常用的实施方法:反向随机失活
e.g.: 以一个三层随即网络为例
定义向量d
d3=np.random.rand(a3.shape[0], a3.shape[1]) < keep-prob
keep-prop表示保留某个隐藏单元的概率
归一化输入(normalizing inputs):可以加速训练方法
将所有图像的像素值缩放到一个特定的范围(通常是 [0, 1] 或 [-1, 1])
step:
- 零均值化:${M_j} = \frac{1}{m}\sum\limits_{i = 1}^m {x_j^{(i)}}$ $x_j:=x_j-\mu _j$
- 归一化方差:${\sigma ^2} = \frac{1}{m}{\sum\limits_{i = 1}^m {({x^{(i)}})} ^2}$ ${x_j}: = \frac{x_j}{\sigma }$
梯度消失和梯度爆炸
梯度爆炸:各层权重w都大于1,层数很大
梯度消失:各层权重w都小于1,层数很大
神经网络的权重初始化
${w^{[l]}} = np.random.randn({n^{[l]}},{n^{[l - 1]}}.*np.sqrt(1/{n^{[l - 1]}}))$
$n^{[l - 1]}$表示第l-1层神经元的数量;如果用的Relu激活函数,sqrt中的1改为2更好
梯度检验:确保backprop正确实施
${\theta _{\text{i}}} = (w_i^{[1]},b_i^{[1]},…,w_i^{[l]},b_i^{[l]})$连接成一个超大向量
$d{\theta _{approx[i]}} = \frac{J({\theta _1},{\theta _2},…,{\theta _i} + \epsilon ,..) - J({\theta _1},{\theta _2},…,{\theta _i} - \epsilon ,..)}{2\epsilon }$验证是否逼近$d{\theta _{[i]}} = \frac{\partial J}{\partial {\theta _i}}$
验证方法:计算两个向量的欧式距离$\frac{||d{\theta _{approx[i]} - d{\theta _{[i]}}||{^2}}}{||d{\theta _{approx[i]}}||{^2} + ||d{\theta _{[i]}}||{^2}}$,$\leqslant {10^{ - 7}}$没问题,$\approx {10^{ - 5}}$可能有问题/bug,$\approx {10^{ - 3}}$有问题
注:
- 不要在训练中使用grad check,它只用于调试
- 如果算法的梯度检验失败,要检查所有项,并试着找出bug,注意$\theta$的各项与b、w的各项都是一一对应的
- 在实施梯度检验时,如果使用正则化,请注意正则项
- 梯度检验不与dropout同时使用
- 现实中不会在随机初始化时运行梯度检验
优化算法
Mini-batch梯度下降法
将整个训练样本分成若干份(mini-batch),然后迭代。
假设训练样本m个,分成n份,一次遍历训练集,可以做n次梯度梯度下降
- m<2000时,直接batch gradient descent(就是之前讲的常规梯度下降法)
- m很大时,建议分成$2^n$倍(跟电脑内存存储方式有关)
指数加权平均(Exponentially weighted averages)(统计学中称为指数加权移动平均)EWA/EMA
是一种给予近期数据更高权重的平均方法
假设有n个数据$[\theta_1, \theta_2, .., \theta_n]$,求过去t个时刻的平均数?
常规方法:$v_t = \frac{(n-1)v_{t-1} + \theta_t}{n}$
EWA:${v_t} = \beta {v_{t - 1}} + (1 - \beta ){\theta _t}$
整个式子可以看成$v_t$是$\frac{1}{1-\beta}$个数据的平均值
指数加权平均的偏差修正(bias correction)在预估初期,不用$v_t$,而用$\frac{v_t}{1-\beta^t}$
动量梯度下降法(Gradient descent with momentum)
基本想法:计算梯度的指数加权平均数,并利用该梯度更新权值
$$\left{ \begin{gathered}
{v_{dw}} = \beta {v_{dw}} + (1 - \beta )dw \hfill \
{v_{db}} = \beta {v_{db}} + (1 - \beta )db \hfill \
\end{gathered} \right.$$
$$\left{ \begin{gathered}
w: = w - \partial {v_{dw}} \hfill \
b: = b - \partial {v_{db}} \hfill \
\end{gathered} \right.$$
RMSprop算法(RMS:root mean square均方根,标准差)
$$\left{ \begin{gathered}
{S_{dw}} = \beta {S_{dw}} + (1 - \beta )(dw)^2 \hfill \
{S_{db}} = \beta {S_{db}} + (1 - \beta )(db)^2 \hfill \
\end{gathered} \right.$$
$$\left{ \begin{gathered}
w: = w - \partial \frac{dw}{\sqrt {S_{dw}} } \hfill \
b: = b - \partial \frac{db}{\sqrt {S_{db}} } \hfill \
\end{gathered} \right.$$
原理: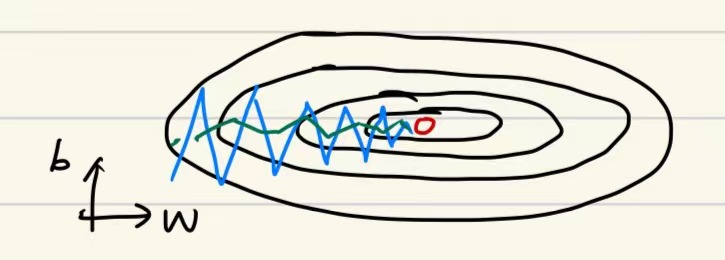
我们希望在横轴(w方向)学习速度快,纵轴(b方向)减缓摆动,所以有了$S_{dw}$,、$S_{db}$,w要除以一个较小的数($S_{dw}$相对较小),b要除以一个相对较大的数($S_{db}$较大)。
Adam优化算法(Momentum和RMSprop的结合)
步骤:
初始化:$v_{dw}=0$ $S_{dw}=0$ $v_{db}=0$ $S_{db}=0$
计算Momentum指数加权平均数:
$$\left{ \begin{gathered}
{v_{dw}} = \beta_1 {v_{dw}} + (1 - \beta_1 )dw \hfill \
{v_{db}} = \beta_1 {v_{db}} + (1 - \beta_1 )db \hfill \
\end{gathered} \right.$$使用RMSprop进行更新
$$\left{ \begin{gathered}
{S_{dw}} = \beta_2 {S_{dw}} + (1 - \beta_2 )(dw)^2 \hfill \
{S_{db}} = \beta_2 {S_{db}} + (1 - \beta_2 )(db)^2 \hfill \
\end{gathered} \right.$$使用Adam算法,一般要计算偏差修正
$v_{dw}^{corrected} = \frac{v_{dw}}{1 - \beta _1^t}$
$v_{db}^{corrected} = \frac{v_{db}}{1 - \beta _1^t}$
$S_{dw}^{corrected} = \frac{S_{dw}}{1 - \beta _2^t}$
$S_{db}^{corrected} = \frac{S_{db}}{1 - \beta _2^t}$
更新权重
$$\left{ \begin{gathered}
w: = w - \partial \frac{v_{dw}^{corrected}}{\sqrt {S_{dw}^{corrected}} + \epsilon } \hfill \
b: = b - \partial \frac{v_{db}^{corrected}}{\sqrt {S_{db}^{corrected}} + \epsilon } \hfill \
\end{gathered} \right.$$
学习率衰减(learning rate decay)
加快学习算法的一个办法是随时间慢慢减少学习率
$\partial = \frac{1}{1 + decayrate \cdot epoch - num}{\partial _0}$,epoch-num是训练的代数
$\partial = {0.95^{epoch - num}}{\partial _0}$
$\partial = \frac{k}{\sqrt {epoch - num} }{\partial _0}$
$\partial = \frac{k}{\sqrt t }{\partial _0}$
局部最优问题




